SHAKEY
Shakey 는 추론하여 행동하는 최초의 mobile robot 이다. Stanford Research Institute (SRI) 의 Artificial Intelligence Center 에서 1966 부터 1972 까지 개발한 것이다. Shakey 는 실질적인 전설과 같은 것이고 현재의 AI 와 로봇공학에 영향을 끼쳤다. SHAKEY 프로젝트는 논리적 추론과 물리적 행동의 완전한 통합을 보여준 최초의 것이었다.
Nilsson, N., (ed.), Shakey the Robot, Technical Note 323, (about 6 MB), SRI International, Menlo Park, CA, 1984SHAKEY video : 이 필름 SHAKEY: Experimentation in Robot Learning and Planning 은 1969 년쯤에 Peter Hart 와 Nils J.Nilsson 이 만든것이다.
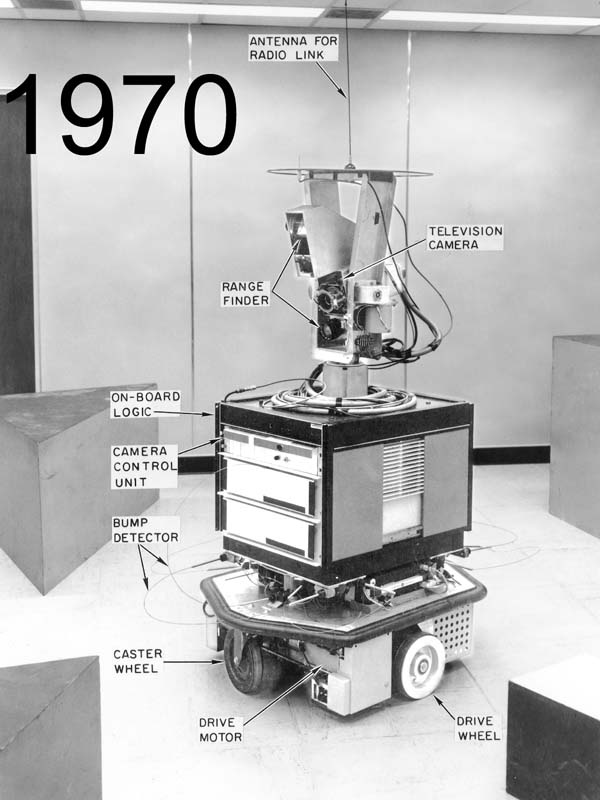
Shakey 는 TV camera, triangulating range finder, bump sensors, DEC PDP-10 그리고 PDP-15 컴퓨터와 radio and video link 를 통해서 연결된다. 또한 perception, world-modeling, acting 을 위한 프로그램을 사용했다. 낮은 수준의 action routines 이 간단한 moving, turning, route planning 등을 처리한다. 중간 수준의 action 은 더 복잡한 일들을 확실히 수행하도록 낮은 수준의 action 을 서로 연결하여 수행된다. 높은 수준의 프로그램들은 사용자에 의해 주어진 목표를 성취하기 위해 계획을 만들고 수행할 수 있다. 그 시스템은 또한 가능한 미래의 용도를 위해서 이러한 계획들을 일반화하고 저장해 두었다.
Stanford's Cart and SRI's Shakey : 아래 그림의 "Stanford Cart" 와 SRI 의 "Shakey" 는 컴퓨터에 의해 제어되는 최초의 mobile robot 이다 (큰 mainframe 이 초당 25 만의 계산을 수행하고, radio 에 의해 로봇에 링크된다). 둘다 TC camera 가 시각 역할을 한다. Cart 는 흰색 라인을 따라서 거의 확실하게 따라간다. Shakey 는 확실하지는 않지만 크고 다양한 (prismatic) 물체들을 찾을 수 있다. 그것들의 제어의 복잡함은 Elsie 에서나 Beast 에서 보다도 훨씬 더 크다 (lines can be tracked using simple Elsie-like techniques with ground-mounted lights and photocells, but it takes complex adaptation and prediction to do it with ambient light from a high vantage point), 그리고 로봇을 제어하기 위한 컴퓨터의 사용은 캄브리아기 (Cambrian explosion) 에 신경계를 가진 다세포 동물의 출현과 비교될 수 있다 ; 둘다 각자의 영역에서 행동이 복잡한 경우에는 어쩔줄을 모른다 (blew the lid).
Shakey
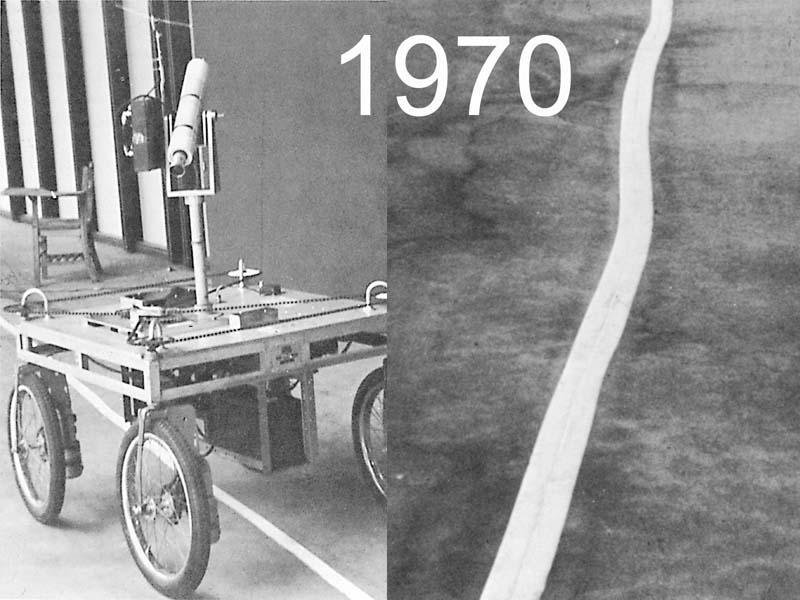
Cart