Haptics (Touch)
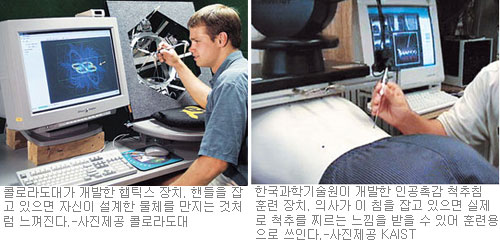
"인공촉감 시대 컴퓨터로 만진다" 손에 느낌 전달 '햅틱스 기술' : 동아일보, 2003.7.1, 신동호 기자 : 2006년 경부고속도로. 김씨는 오른쪽 옆 차로에서 다른 차가 뒤에 바짝 붙어 달려오는데도 이를 모르고 차로를 바꾸기 시작했다. 그 순간 의자 등받이가 김씨의 오른쪽 어깨를 두드린다. 깜짝 놀란 그는 재빨리 핸들을 원위치로 돌렸다. 만일 어깨를 두드리는 ‘햅틱 장치’가 없었다면 김씨는 이날 큰 사고를 당했을지도 모른다. 컴퓨터가 모터와 기계를 구동해 힘과 촉감을 느끼게 하는 햅틱스(haptics) 기술이 새로운 정보기술혁명을 예고하고 있다. 햅틱스란 ‘만진다’는 뜻으로 인공촉감 기술을 의미한다. 사람은 시각이나 청각보다 촉감에 훨씬 빠르게 반응한다. 현재 컴퓨터의 출력 장치는 모니터와 스피커뿐이지만 앞으로는 인공촉감을 출력하는 햅틱 장치가 거의 모든 컴퓨터에 달릴 전망이다. 햅틱스가 가장 효과적으로 쓰이고 있는 제품은 게임용 조이스틱과 시뮬레이터이다. 최근에는 마우스나 자동차에도 햅틱스 기술이 쓰이고 있다. 로지텍의 아이필(iFeel) 마우스는 스크롤바나 아이콘 위에 놓으면 손에 느낌이 전달된다. BMW 자동차에 장착된 아이드라이브(iDrive)는 운전 중 위험하게 디스플레이를 보지 않아도 조작버튼의 진동 차이로 오디오 등 다양한 장치의 상태를 알 수 있다. 햅틱스 기술은 정밀한 수술, 로봇 원격제어, 미술작품 조각, 전자상거래, 엔터테인먼트, 연구개발 분야에도 쓰이기 시작하고 있다. 최근 전자부품연구원은 다관절 햅틱 장치를 개발했다. 이 장치의 핸들을 잡고 움직이면 스프링에 매달린 쇠구슬을 던졌다 받았다 하는 느낌을 실제처럼 생생하게 느낄 수 있다. 연구원 정중기 박사는 “햅틱 장치는 가상공간 혹은 원격조작 상황에 생생한 현실감을 줄 뿐만 아니라 기계 조작을 편리하고 안전하게 한다”고 말했다. 햅틱스 분야의 국내 개척자인 한국과학기술원(KAIST) 기계공학과 권동수 교수 (Telerobotics & Control lab) 는 98년부터 햅틱스 기술을 적용한 마우스, 조이스틱, 수술용 로봇과 오락용 자전거, 자동차, 낚시 시뮬레이터를 잇달아 개발해 오고 있다. 권 교수가 한국과학기술원 교수 6명과 공동 개발한 오락용 가상현실 자전거 시뮬레이터를 타면 화면을 보며 언덕을 오를 때 페달을 돌리기가 매우 힘들다. 또 보도블록과 풀밭을 달릴 때도 똑같은 느낌을 받는다. 시뮬레이터의 낚싯대를 잡으면 미끼를 문 물고기가 물거나 끌어 손맛을 느낄 수 있다. 권 교수팀은 KAIST 복지로봇센터, 벤처기업 뉴로스와 함께 인공관절 이식수술 로봇을 개발하는 데도 성공해 올해 하반기에 충북대 정형외과 원중희 교수가 실제 수술에 처음 사용할 예정이다. 인공관절을 이식하려면 환자의 뼈에 정확하게 구멍을 뚫어야 한다. 의사가 수술용 햅틱 로봇의 원격제어장치를 손으로 조작해 수술을 할 경우 건드려서는 안 되는 부분에 이르렀을 때 딱딱한 벽에 부딪힌 느낌을 준다. 따라서 수술이 훨씬 안전하고 정확해진다. 권 교수는 햅틱 마우스도 개발했다. 이 마우스는 왼쪽과 오른쪽에 버튼이 있다. 모니터를 보면서 손가락으로 마우스 버튼을 눌러 화면상의 물건을 옮기면 실제로 물건이 옮겨진다. 또한 마우스를 통해 물건의 모양을 느낄 수도 있고 딱딱한지 부드러운지, 매끄러운지 거친지도 느낄 수 있다. 권 교수는 “앞으로 10년 쯤 뒤면 햅틱 마우스가 전자상거래를 실감나게 바꿀 것”이라며 “이때가 되면 사이버 쇼핑몰에서 3차원 입체 영상을 보면서 햅틱 마우스로 전자제품을 작동하면서 모양과 재질을 느껴보고 살 수 있게 될 것”이라고 말한다. 현재의 햅틱스 기술 수준은 미묘한 촉감을 창조해낼 만큼 높은 수준에 이르지는 못했지만 고도로 발달하게 될 경우 사이버 섹스도 가능해지게 된다.
term :
촉각 (Tactile Sense) 인터페이스 (Interface) 로봇 (Robot) 컴퓨터 (Computer) 패턴인식 (Pattern Recognition) 인공지능 (Artificial Intelligence)
site :
Haptics Community Web Pages : Northwestern 대학 : Haptics 관련 lab Photos